Articles and information about DX or distant stations outside the North American continent. Topics include working DX, DXpeditions, DX Stations, DX related antennas, software, and equipment and more.
These antenna systems use short active vertical antennas in various combinations to create directional receive antennas for the low bands (80m and 160m).
We recently upgraded our low-band receive antennas to use the latest electronics. The upgrades improved the performance of both antennas and enabled us to contact China on 80m. You can read more about the project here.
We did a guest spot on DXendineering’s weekly video broadcast about the project. You can view the video here.
Lately, there has been quite a bit of nice DX out there on the HF bands. If you are like me, you have a modest station to work from (100 watts and a wire antenna or two), but still like to chase DX. Often, you’ll hear lots of other “1 landers” working the DX station, but you can’t ever seem to break the pileup. Well, I have a few suggestions I’ve gathered over my 30 years of DX’ing and contesting that I’d like to share, which might help you get a few new ones.
One universal “truth” I have found though, above all others, is that working DX on CW is infinitely easier than working DX on SSB. If you have not yet jumped in to learn CW, I highly advise it if you want to be a successful DX’er and work the rare ones from a modest station. FT-8 / FT-4 is a bit of a different animal, and not all of what I will share is applicable to those digital modes, so I am going to focus on CW and SSB (although I work a lot of FT-8 and FT-4).
Without further ado…
#1: Listen, Listen, Listen
Did I mention you should listen? This is the first step in the process to catch that needed country. Almost all of my other recommendations stem from this… don’t be the alligator on the calling frequency… ever. A good DX’er listens far more than they transmit.
#2: Use a DX Cluster
I recommend using a DX Cluster for finding the DX. It is much easier to find the choice DX if you have others looking for it too! If you’re not familiar with a DX Cluster, there is a good primer here. If you are but aren’t sure which to connect to, I recommend W1DX (dxc.dxusa.net:7300), unless you use Ham Radio Deluxe, in which case I suggest WA9PIE-2 (hrd.wa9pie.net:8000). They both run the DXSpider cluster software. When you use a “cluster”, you might want to set a few filters to get rid of the spots (the reports of DX activity) you don’t really want to see. Here is a couple that work on DXSpider to get you started.
From the cluster, console enter the following to only see DX spots originating from US and Canadian stations…
Disconnect from the cluster, and then reconnect. At this point you should only see DX spots from US and VE stations
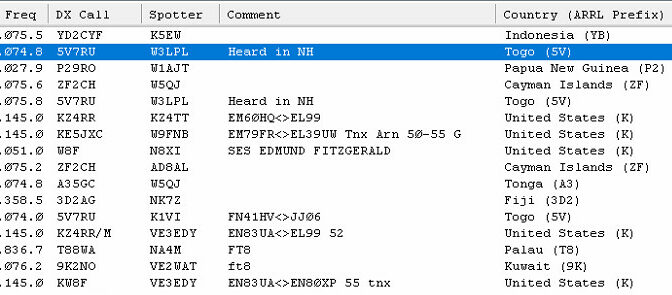
Typical DX Cluster screen
#3: Find and Hear the DX Station’s Calling Frequency
Once you identify the DX you want to chase, go find them on the air. Sometimes, that is easier said than done. Here’s where a set of good headphones and your radio’s RX IF filters will really come in handy.
Wearing headphones is important because they filter out all that background noise. If they are good headphones, they can also enhance the audio you are listening to and reduce fatigue.
As for your radio’s RX IF filters, this is where you may need to “RTFM”. Most modern HF radios will have some form of IF filter or DSP to shape the received audio. On Yaesu radios, they are “Width”, “Shift”, “Contour”, and “APF”. I won’t go into detail about their use here as all radios will be a bit different. I will say, however, that learning to use them is a critical part of effectively hearing the DX station. Ultimately, you can’t work ’em if you can’t hear ’em. Do not start calling the DX until you can reliably hear them.
#4: Find Where the DX is Listening
DX stations will listen in one of two ways… simplex (same TX and RX frequencies) or split (different TX and RX frequencies). Sometimes, the spot on the cluster will tell you where to start. However, many times the spots are not entirely right.
Simplex
If DX is working simplex, you are all set as to finding their RX frequency, but trust me… working rare DX simplex can be very difficult and painful. Always pray for split ;).
Split
If they are working split, finding the RX frequency can be a little challenging. Remember, working split means the DX station is transmitting on one frequency and listening somewhere else. Notice I didn’t say “on another frequency” – this is important to recognize. Many times, if the DX is listening on only one frequency, you can determine this from the DXCluster spot (i.e. “up 5”, which means that they are listening up 5 kHz from their TX frequency (such as TX: 28.507 / RX 28.512). However, often the DX is listening in a range of frequencies (i.e. “up 5-10”), which means they are listening somewhere between 5 and 10 kHz from their TX frequency (such as TX: 28.507 / RX 28.512 to 28.517). Now comes the fun part.
If the DX is listening split, it’s your job, as a skilled DX’er, to figure out their strategy and exploit it. Remember, even if the DX says “listening up 5”, they may not be listening up 5. They may in fact be listening up 7.2 or 9.3 or 3 kHz. Your job is to figure that out. Recently, I worked a DX station on CW that would sign “UP 1”. He was actually listening up 1.3 kHz. Had I simply called him up 1 kHz, I would not have worked him.
Patterns
To figure out their pattern and have a strategy to exploit it, you have some work to do, and likely some frustration in your future. It’s all worth it, though, if you bag an ATNO (All Time New One). Here are some steps to follow to find the DX stations listening frequency if they are working split.
Use the “split” function of your radio (you do know how to use “SPLIT” on your HF rig, right?). Set the “A” VFO to your RX frequency and the “B” VFO to a TX frequency where you think the DX is listening.
When the DX answers a station (i.e. “W1ABC UR 599”), flip the VFO’s so you are listening on the “B” VFO (or use your dual receive). Now find the station that the DX answered as they give their report. This can be tough, but is essential, especially if the DX is listening across a range of frequencies. Finding the station answering the DX gives you an idea of where the DX is actually listening. Do this until you can find/hear a station that the DX answered.
You can now do one of two things… flip the VFOs back and start calling the DX on the frequency you found that the other station was using, or you can keep listening to find if there is a pattern (like is the DX creeping up the band, down the band, moving 500 Hz at a time, staying put, etc). Once you can figure this out, your chances of working the DX greatly improve. When you’ve got their pattern (most DX stations will have one), flip your VFOs and work ’em. Repeating the process as needed.
[Side Note – Being DX
An important side note on being a DX station that may help you be better able to work them… a good DX operator will (in my opinion):
Work split. Simplex is fine if the DX is an everyday DX station like Poland or England. However, if they are even semi-rare, and expect pileups, they should work split. Simplex makes working rare DX very hard. The DX’ers have to separate the DX from the calling stations, which can be nearly impossible if the stations in the pileup call over top of the DX (which they do most of the time). IMO, simplex is bad.
Manage the pileup. Managing a pileup is hard and is a learned skill. To manage a pileup, the DX operator needs a strategy. It could be nearly anything, but having a strategy allows the DX to work more stations more efficiently and with less fatigue, and makes it easier for skilled DX’ers to work them.
]
#5: Use Your Rig’s “Monitor” Feature
If you’re working SSB, use your rig’s “Monitor” feature to listen to your transmitted audio. Do this to make sure it is not overdriven and sounds good. If you can adjust your TX audio as many new rigs can, do a little work to determine the best TX audio configuration for your voice and equipment. For many voices, there are differences in DX versus Rag Chew TX audio settings. For this, Google is your friend. (I recommend using “Monitor” for CW as well… lets you hear the quality of your transmitted tone too).
#6: Call High / Low
If you’re working CW and having a hard time working the DX on what you know is the correct frequency, try calling 100 Hz up or down from there. Sometimes that will serve to separate your signal from the others enough to work them. Due to the width of SSB signals, this rarely works on SSB, but can. Experiment.
#7: Watch Your Keying Speed
Also for CW… ideally you will match the DX’s keying speed. If they are calling at 35 WPM, call them at 35 WPM. You can go slower, but do not exceed their speed, as they may be at the top of their capability. If you send back at 45 WPM, you might never work ’em. Sometimes, however, if the pileup is full of speed demons on the key, sending a little more slowly will allow your signal to stand out. Again… experiment.
#8: Be Patient
I mean this in more than one way… it may take a while to work that ATNO, but patience on the mic or key can also pay off. While you are listening, notice if the DX is responding to stations quickly after calling “QRZ” or if there is some “dead” space in there. If there is a delay between “QRZ” and the DX responding, that may indicate that the pileup is all calling at the same time, immediately following the “QRZ”, making it impossible for the DX to discriminate calls; and the DX is waiting for a “laggard” to call them after the main pileup has finished. Be that laggard! Wait 3,4, or 5 seconds and then make your call. You might be the lone voice the DX hears!
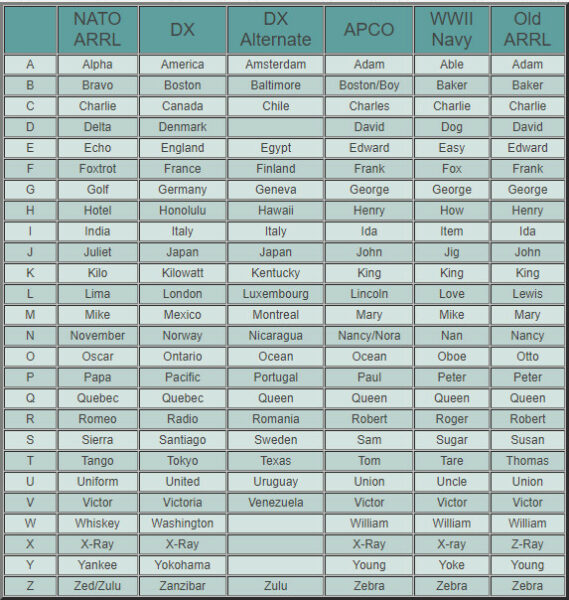
#9: Use Proper Phonetics
Many stations like to use their own phonetics “Wally One Finger Licking Good” may sound funny, but when the conditions are marginal, there’s a huge pileup, and the DX’s first language is not English; you might as well hang up the mic. Use proper, recognized phonetics so the DX can understand your call. K0NR has a great document on proper phonetics.
#10: Use the DX Station’s First Language
I have found that using the DX station’s first language can give a 10 dB gain to your signal LOL. So, if you speak German, French, Spanish, or any other language and you find a DX station that speaks that, use it to your advantage!
To “Tail End” or Not?
While not a recommendation (hence no number), I wanted to address “tail ending”. This can be a controversial tactic, but it can also be very effective if done correctly.
Tail-ending is when you throw your callsign out at the very end of someone else’s report to the DX (for example you say “November One Xray Yankee Zulu” as soon as “K5AAA” finishes his report. It goes something like this (K5AAA says: “P5DX, UR 599 in Texas” and you immediately say “November One Xray Yankee Zulu”).
Depending on how quickly the DX responds to K5AAA and how they feel about tail-ending, you might be able to work them by doing this. Some DX do not like that practice and will not respond to “tail-enders”. Best to either see if others are successful with this or don’t do it. I personally do not like this tactic, but it can be effective (especially in contests).
Putting it Into Practice
Before you start using these tips… look back at tip #1. Your ears are your best tool to successfully work DX. Of course, there are times that you simply won’t work a DX station no matter what you do. I had that issue on the very morning I wrote this… 30 minutes of using every trick I know, and I still didn’t work them before their signal faded.
So there you have it… my top 10 list of strategies to be a successful DX’er. As always, your mileage may vary, and others may have a completely different list. Every little trick helps in my opinion. Whatever strategies you choose to employ, just get out there and have fun.
In case you are curious, I have been on both sides of the pileups, working as the DX from a number of locations with very large pileups, as well as working from my home as the DX’er. At home, I rarely run more than 100 watts and have never had more than wire antennas or a vertical… unfortunately no beams have ever graced my yard. Yet, I’ve been successful in working DXCC in a weekend during contests, and have worked DXCC on 5 bands. I finally have a good 160M antenna up, so maybe I’ll increase my country count there too in 2023!
HFTA stands for High-Frequency Terrain Assessment. Some documentation refers to it as High-Frequency Terrain Analysis.
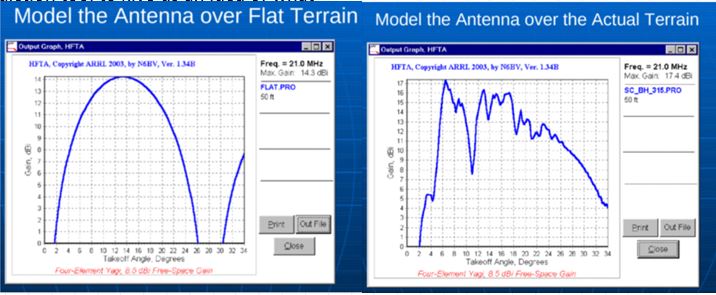
HFTA is a software tool that generates the vertical radiation pattern of horizontally polarized antennas taking into account the profile of the surrounding terrain. The irregularity of local terrain has a profound effect on vertical radiation patterns. Note that HFTA does not compute radiation patterns for vertically polarized antenna radiation.
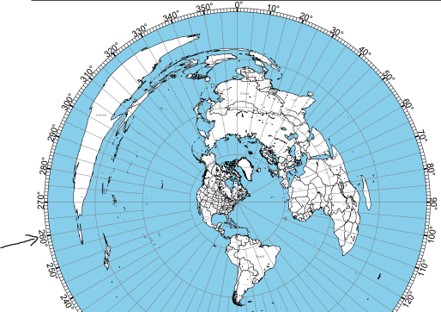
Azimuthal Maps
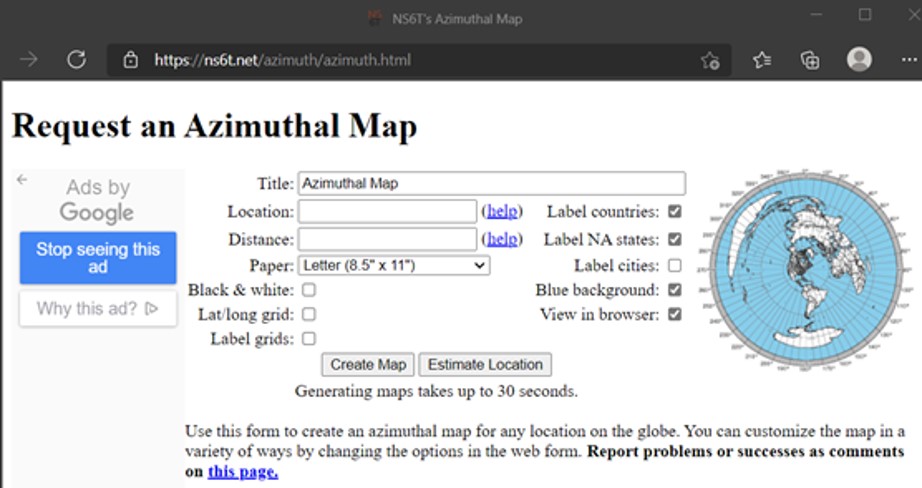
Request Azimuthal Map
HFTA provides performance information for your antenna taking account of the terrain profile in a particular direction. Do you know what is out there in any direction? Standard Mercator maps show a representation of the world, but do not provide important information that is of use to Hams. There is a website that will create a map with your location at the center of it. It is free and all you need to know to use it is your grid square info. The more info you have the more accurate the map is.
You can put the map on your rotator controller to show where it is pointing. Some computer-based rotator control programs can also use the image.
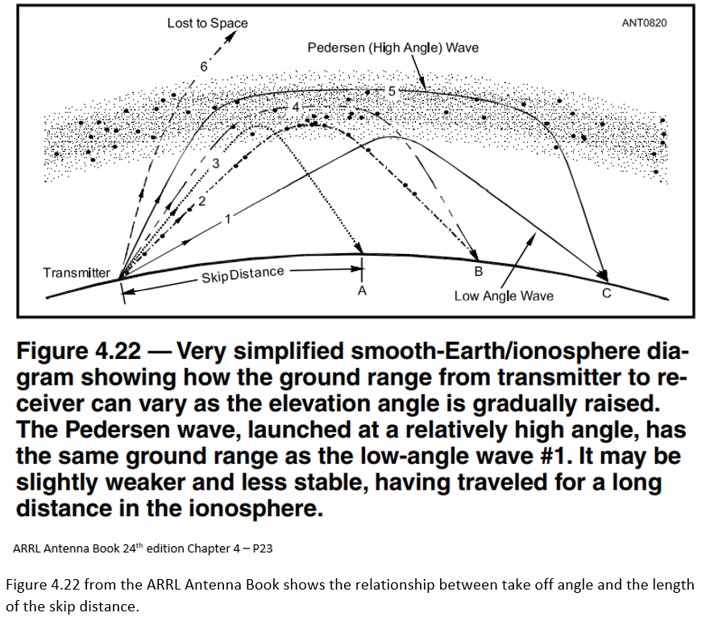
Take-off Angles
ARRL Take Off Angles
Why use HFTA
Use HFTA for planning an HF station scientifically. It can assist with determining the optimal antenna location and height. HFTA takes ground elevation data, frequency, and the height of the antenna to calculate the take-off angle in a specified direction. It is particularly useful for Hams interested in DX and contesting. Many of us use some type of propagation prediction tool to give us an idea of what bands may be open at a given time and to a specific location. Once the terrain profile and antenna information are configured the results can be used to provide a tool for propagation prediction that is custom tailored to your precise situation. This is very helpful when formulating strategies for contesting or hunting down rare DX. Terrain around your antenna up to 10,000 feet has a significant impact on your signal.
HFTA Models
Typical questions that HFTA can answer
How high should my antenna be?
Is it worth spending more money on a taller tower?
My mast is up 35 feet. Is it worth it to extend it to 45 feet?
Why can’t my antenna hear signals from ??
About to by a new house? Is the house location well suited for Ham Radio?
How does it work
1. Generate terrain profile data files. These are created using digital terrain data available from various online databases. There are a few additional programs that can be used to create these files and the HFTA instructions cover the required steps in detail.
2. Choose the type of antenna and the number and heights of antennas in a stack.
3. Select the type of antenna to be used.
4. Select an Elevation-Statistics file for your targeted receiving area. This file will include your station location (receiving area) and the area from which you will be receiving signals.
The software includes files with statistics that were computed for all the times over the 11-year solar cycle when each band was open. The Antenna Book’s data contains files for all regions of the USA to Europe (EU), the Far East (JA), South America (SA), South Asia (AS), Southern Africa (AF), and the South Pacific (OC), plus data files for a wide variety of other transmitting sites throughout the world. You choose the general area where your transmitter is located during initial installation of the HFTA program.
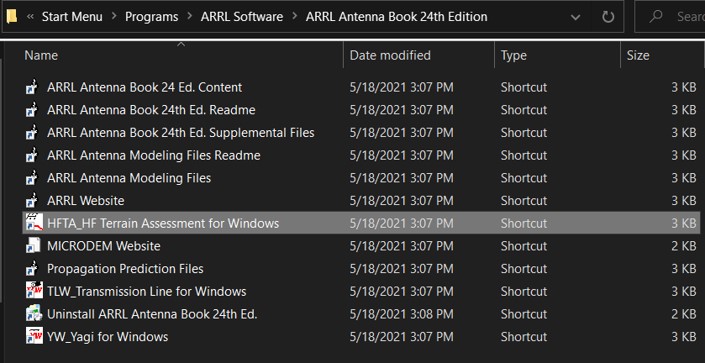
How to get HFTA
How to get HFTA
HFTA is included in the ARRL Antenna Book (currently 24th Edition). It is part of the package that includes the book when you get it for download from the ARRL. It was also included in a CD that came with the physical book. The e-book or Kindle is available from different sources. To be sure you get the software files associated with the book I suggest ordering it directly from the ARRL. Here is a link: http://www.arrl.org/shop/ARRL-Antenna-Book-eBook-Windows-Version/
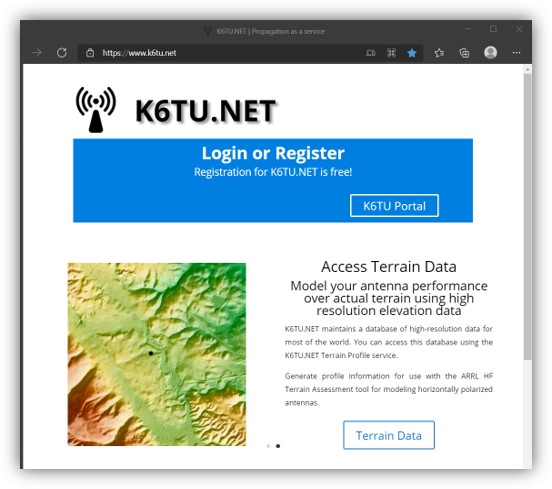
K6TU.NET
K6TU.NET
The website https://www.k6tu.net/ is an excellent resource in combination with the HFTA software and offers many tools and resources beyond those that support HFTA.
Users need to register for free to use the tools and there is also a subscription service which offers more tools that go beyond the scope of HFTA available. To create HFTA Terrain Profiles, this website makes it very easy and offers very accurate data for stations located in the USA.
K6TU.NET provides a framework of simple to use forms to build propagation predictions or Terrain profile requests. Use the Resource menu at the top of the page to access guides, FAQs and background information. Use the Getting Started page to start with a tutorial which will guide you through the steps to create your first prediction.
Generating an accurate terrain profile
K6TU.NET now has the capability to generate a set of profile files for your location by simply filling in a form and submitting the request. Much like generating a Propagation Prediction, the site captures the information necessary to fulfill the request and then generates the results in the background. Once the results are available, an email is sent to you with a link to the results.
Generating a Terrain Profile Request is very simple and starts by selecting Terrain Profile from the New menu at the top of the page when you are logged in as a registered user. You do NOT need to be a subscriber to K6TU.NET to access this service – it is freely available to anyone with an activated account.
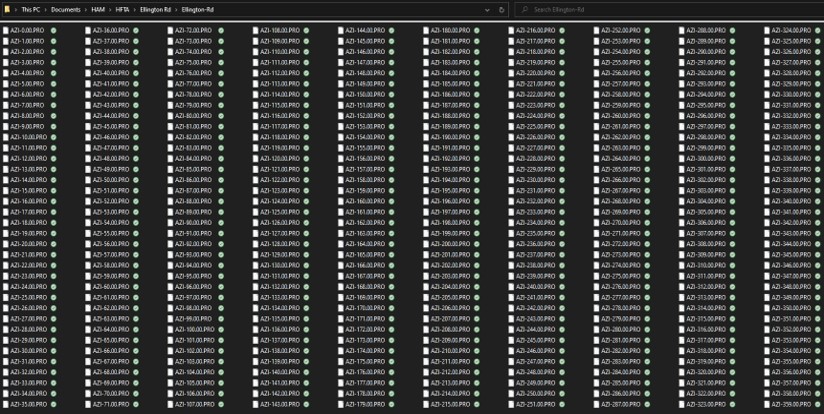
When the request is completed, the site creates a Terrain Profile Result which has a link to the ZIP file containing the terrain profile files (360 of them, one for each degree of azimuth) together with an explanation of the source of the terrain data for this profile.
Terrain Data
The screenshot above shows the 360 files for the terrain data for my QTH in Tewksbury, MA I have another folder with the terrain data for my NH QTH as well.
HFTASweep
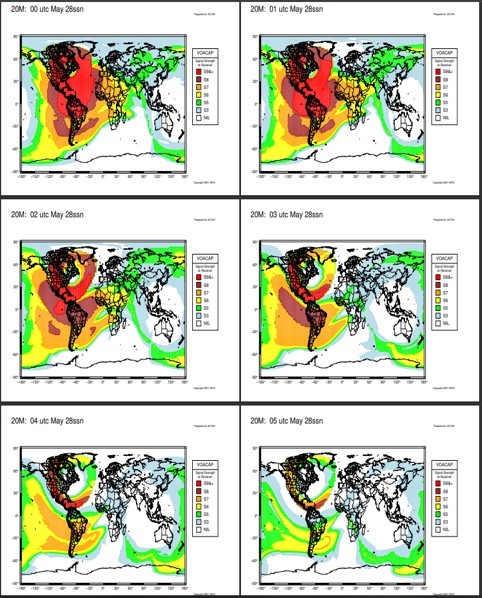
HFTASweep is a program “wrapper” for the ARRL HF Terrain Analysis program (HFTA). HFTASweep runs HFTA 90 times programmatically to model your HORIZONTAL polarized antenna over the actual terrain around your location. The program captures the results for each azimuth direction (4 different azimuth angles at a time) and at the end, builds a VOACAP type 13 antenna model as a file called antenna.13. You can upload type 13 antenna files to K6TU.NET and use them in the different prediction options by creating an Advanced Station Configuration from the New option under the Navigation menu. Once you have the type 13 antenna file you can use it to create custom tailored propagation forecasts. Here are a few examples:
HFTASweep
This is 20 meters in May. There is one chart per hour.
Custom Tailored Propagation Forecasts
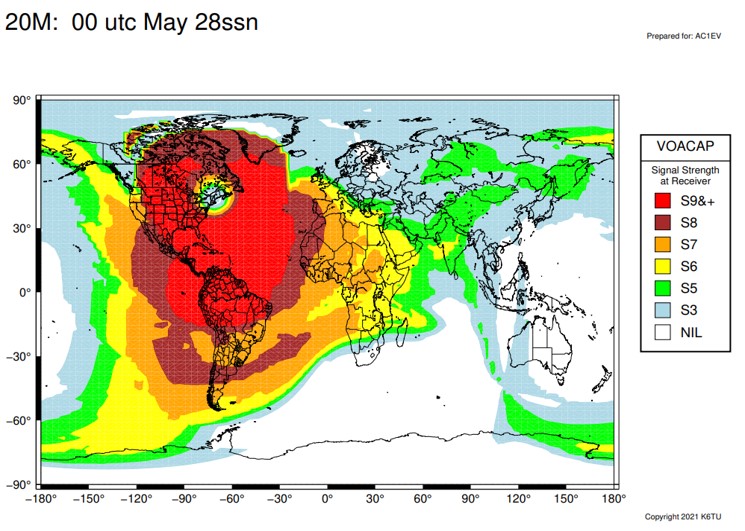
One Hour Forecast
Here is a close-up of one hour on 20 meters.
Contest Strategy
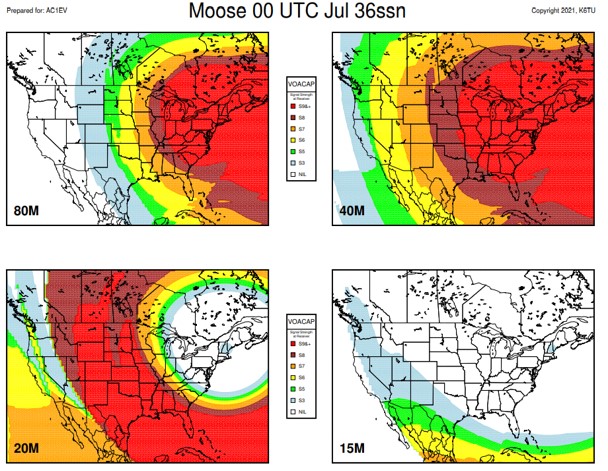
Contest Strategy
Another feature is to prepare multiple band reports to use for formulating contest strategy. Here is an example I created for my NH QTH for 13 Colonies back in July. There are very good instructions and examples on the K6TU web site. It is worth checking out.
How to use HFTA
Blank HFTA and Terrain Files
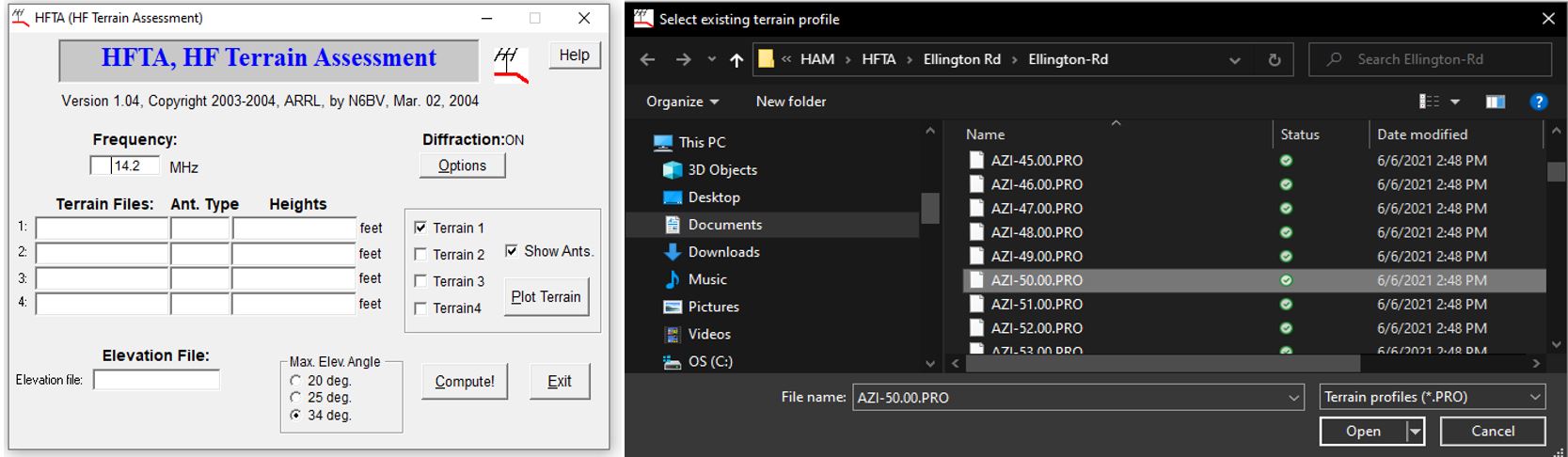
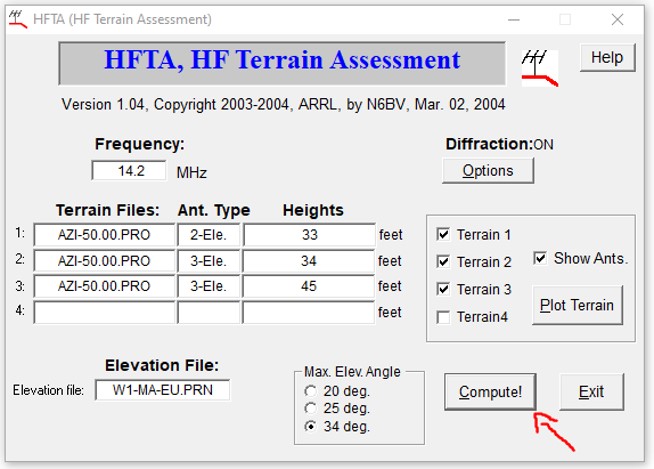
1. Launch the program
2. Select the terrain files you will use for this assessment by clicking in the box. In this example we will examine performance for 50 degrees, which is towards Europe. This Terrain File is for my MA QTH
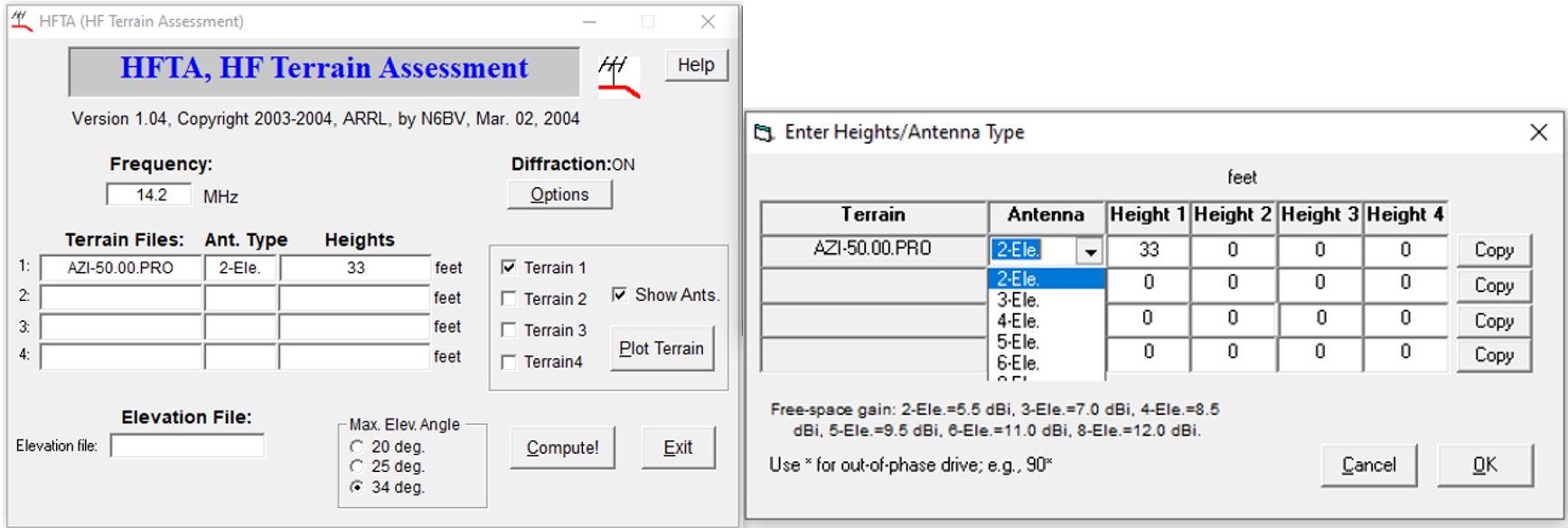
HFTA Antenna Type
3. Click in the Ant. Type box to select the antenna type from a pull-down list. Enter the antenna height in the appropriate box. You can stack antennas up to 4 high!
4. Repeat for other antennas, locations, and heights you wish to compare. In this example I will add a 3 element yagi at 34 feet at my NH QTH (just select the Terrain Profile from that location) and a 3 element yagi at 45 feet from the NH QTH.
Add Elevation File
5. Enter the Frequency
6. Select an Elevation file. These are included with the HFTA software. They are the files derived from the 11-year statistical data mentioned above. This example is for Boston to Europe.
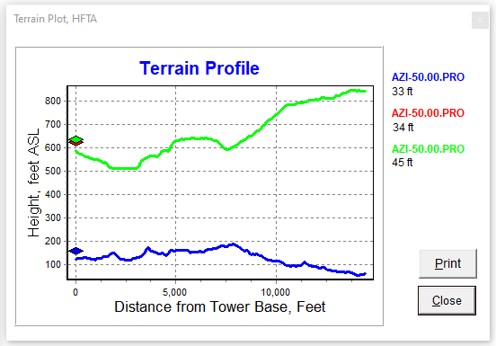
7. Check off the boxes for terrain for each antenna selected and HFTA will generate a profile for that compass heading.
Terrain Profile
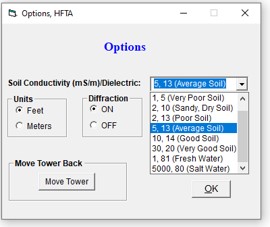
8. The Options button lets you configure units of measurement, Diffraction on/off, and Soil Conductivity (among other things). I have Diffraction turned on since I am around 3 miles from a ridge that is around 200 feet above my antenna. The chart makes it look like I am pointing into the hill, but it actually calculates out to be only 0.76 degrees up from my antenna. I believe my soil in NH is “Good Soil” but I selected Average Soil to create a conservative assessment.
OptionsReady to Compute
9. Click the Compute button to generate the chart.
My Results with HFTA
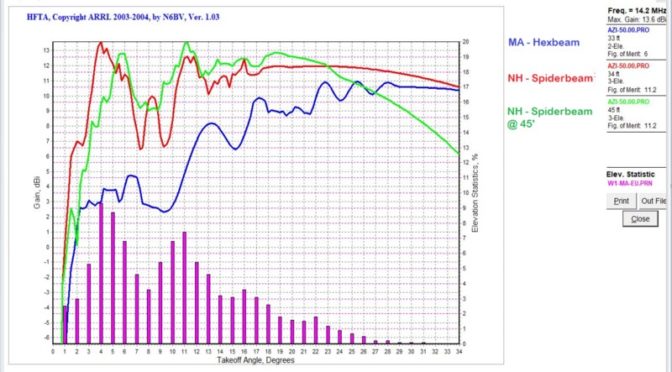
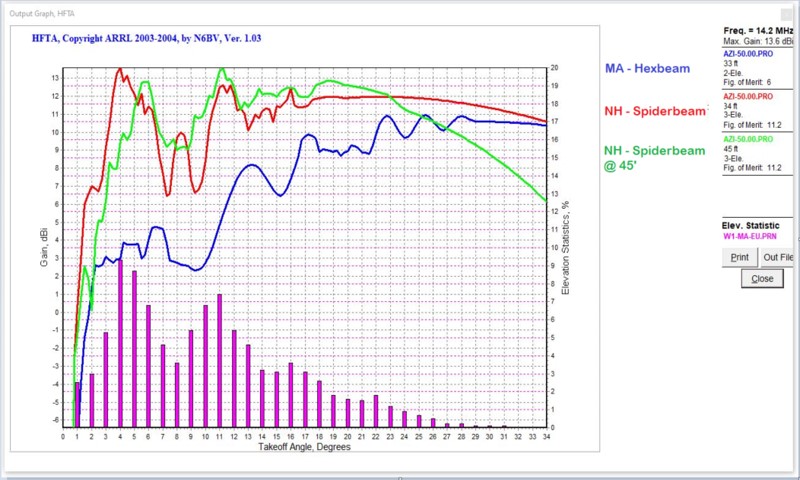
The Output Graph can be resized. Here are my results for the three antenna configurations pointing to Europe:
My Results
The Purple bars show the take-off angle plotted against the percent of time that signals arrive at that angle. This data is what is in the .prn files that you enter in the Elevation File field. Each antenna profile’s performance is represented by the colored line on the chart.
There are some very interesting things that show up on this chart:
1. The Spiderbeam at 33 feet has better performance at low angles than at 45 feet. Also, where the higher configuration is better, it is not a meaningful difference.
2. Both the Spiderbeam and the Hexbeam are adequate for coverage to Europe.
3. At this azimuth (50 deg) for some take-off angles the Spiderbeam has more than a 10 dBi advantage over the Hexbeam! This is before any radio or amp is added to the calculation.
Figure of Merit
Figure of Merit
HFTA uses these elevation statistics, which indicate what percent of the time a signal arrives at a given elevation angle, and compares this info to your elevation plot, generating a relative performance rating called Figure of Merit, expressed in dB.
The software produces a “figure of merit” which is each antenna’s merit based on gain at takeoff angles where, statistically, the most prevalent signals can be expected. If you have great gain at takeoff angles where most of the time no signals are arriving, the FOM is low. When comparing different antenna configurations, the FOM can be used to identify which has an advantage. For the Spiderbeam used in my Europe example, the FOM is the same for 33 feet and 45 feet. The effort and risk to elevate the antenna does not appear worthwhile in this case.
Real World Example
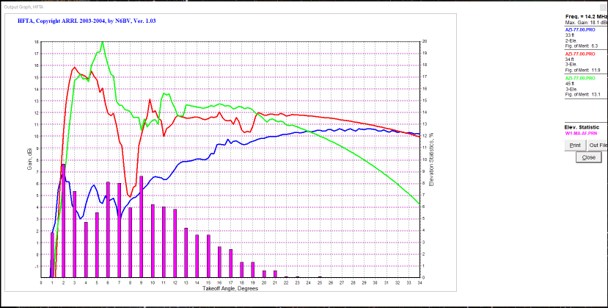
Recently, I noticed a station from Kenya spotted on the cluster. I took a few minutes and was able to make a call successfully to 5Z4BU. I don’t often hear Kenya on the radio, so I ran an assessment using 77 degrees and the Africa Elevation file. Here are the results:
Real World Example
In this case the Spiderbeam at 45 feet would have an advantage, but the antenna at 33 feet was still capable of receiving signals from any likely take-off angles. The FOM for the 45-foot antenna was 1.2 higher than the 33-foot antenna. The Hexbeam in MA may have been able to make the call, but there was a pileup and the additional gain from the Spiderbeam really helped. I was able to make contact in 4 tries.
Australia and New Zealand
260 Degrees AZ Map
Here are two more examples to review. First, we’ll look at Australia and New Zealand. I’ll point my antenna at 260 degrees, which splits the difference between them.
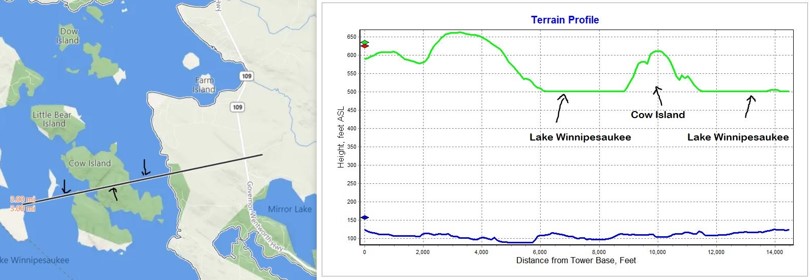
Here is the terrain profile compared with the path covered on the map.
Lake Terrain ProfileAustralia and New Zealand
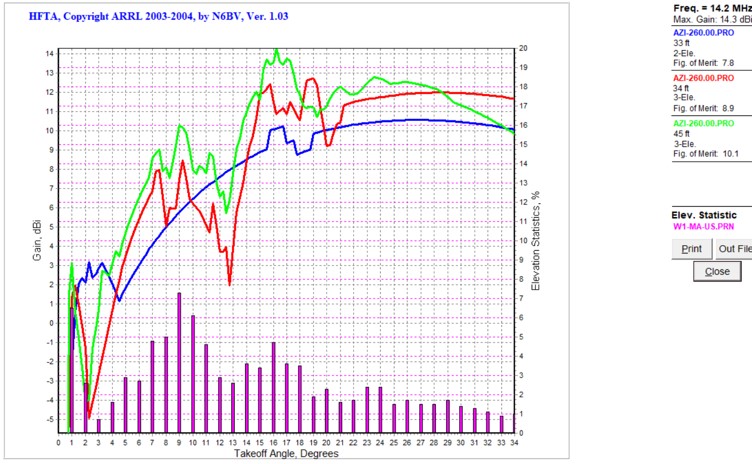
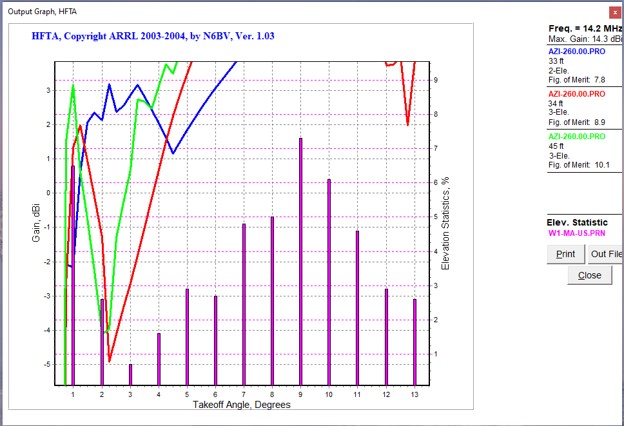
The chart above shows that although New Zealand is around 9,000 miles away, it is not difficult to make contacts there as there are many take off angles that can give successful results. You can select in the chart to capture a close-up of details.
Australia and NZ Close-up
The chart shows that the Spiderbeam at 45 feet will receive signals well at 1 degree and it looks like it will also at the 34-foot height. The Hexbeam will likely miss signals at 1 degree but should handle 2 degrees fine. New Zealand was one of my first Pacific DX QSOs and done with an OCFD and 100 watts.
Japan
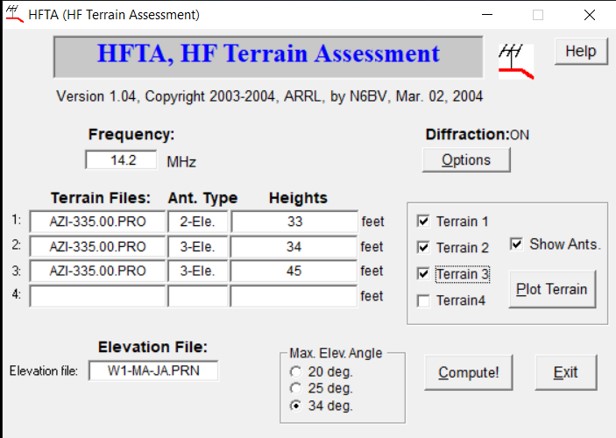
Next, we can check out Japan, which is at 335 degrees. We’ll review the steps again:
Japan
1.Select the Terrain files from each location for 335 degrees
2.Confirm Antenna type and heights are set properly.
3.Select the Elevation file
4.Click Compute!
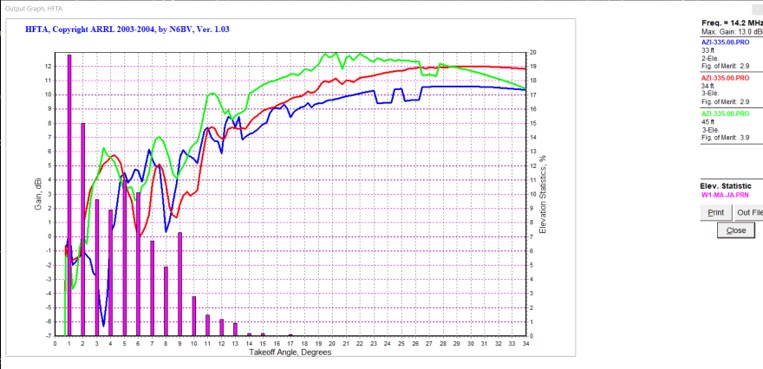
Japan Chart
This chart has lots of useful information. Unfortunately, it does not indicate that I will have a high probability of success contacting Japan. According to the chart, 20% of signals from Japan will come in around 1 degree and 15% at 2 degrees. Both antennas will fail at this angle. The Spiderbeam will have success from 3 degrees and higher. It is interesting to note that the Hexbeam will perform better at 6-degree take-off angle. Japan is only 6,700 miles away, but you can see it is way more difficult to reach than New Zealand.
Conclusion
This has been a simple introduction to HFTA. There are many documents and videos available that discuss the features of the program and strategies for using it.
How well an antenna “plays” depends on take-off angle to the target area, antenna height and local terrain
Lower is sometimes better.
More than one antenna per band will help your overall signal presence.
Design your antenna farm to cover all angles. If you can’t, choose what is important to you.
It is easier to make changes in the design stage of your antenna project. Time spent with this assessment tool can save big dollars and yield a better installation than trial and error.
The ARRL Antenna Book is a terrific resource. This presentation was based on only a tiny fraction of what the book covers. It makes a great gift, too!
We use cookies to ensure that we give you the best experience on our website. If you continue to use this site we will assume that you are happy with it.